



.png)








Cảm biến tích hợp quán tính đo góc
Giải pháp hữu ích về “Cảm biến tích hợp quán tính đo góc”.
Số bằng: 2-0002130
Ngày công bố: 25/10/2019
Tác giả: Chung Tấn Lâm
Chủ bằng: Đại học Quốc gia TP.Hồ Chí Minh.
Giải pháp hữu ích đề xuất cảm biến tích hợp quán tính đo góc xoay theo ba trục X, Y và Z trong không gian. Với khả năng đo được các đại lượng trong không gian như vậy, bộ cảm biến tích hợp này có thể được sử dụng trong các hệ thống điều khiển lái tự động cho máy bay không người lái (AUV, Air Unmaned Vehicles), tàu lặn (ROV, Remoted Operation Vehicle), tàu thủy, cũng như các phương tiện di chuyển trên mặt đất (ground vehicles), và từ đó đưa đến nhiều ứng dụng thực tế cho loại cảm biến này đặc biệt là trên các hệ thống không người lái cần sự cân bằng ổn định khi di chuyển ở chế độ lái bằng tay và lái tự động. Trong tài liệu này, cảm biến tích hợp này được gọi là bộ cảm biến tích hợp quán tính đo góc (IMU, Inertial Measurement Unit).
Đọc toàn văn:
http://www.noip.gov.vn/documents/20182/754455/2130.pdf/b0f4f9d1-fcb0-457d-82ab-3e370e9e8d4e
Theo noip.gov.vn
Cảm biến tích hợp quán tính đo góc
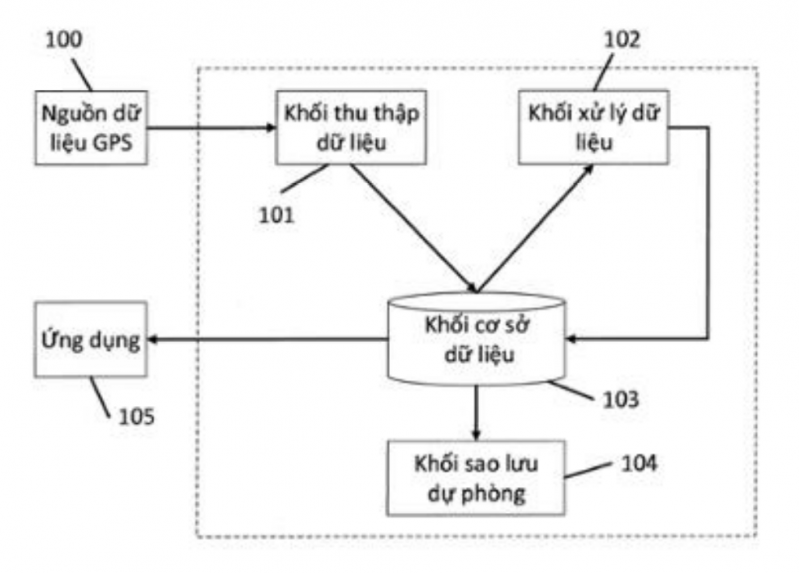
Dữ liệu định vị toàn cầu theo thời gian thực
Giải pháp hữu ích về “Hệ thống và phương pháp xử lý dữ liệu định vị toàn cầu (GPS) theo thời gian thực dùng cho hệ thống giao thông thông minh”.
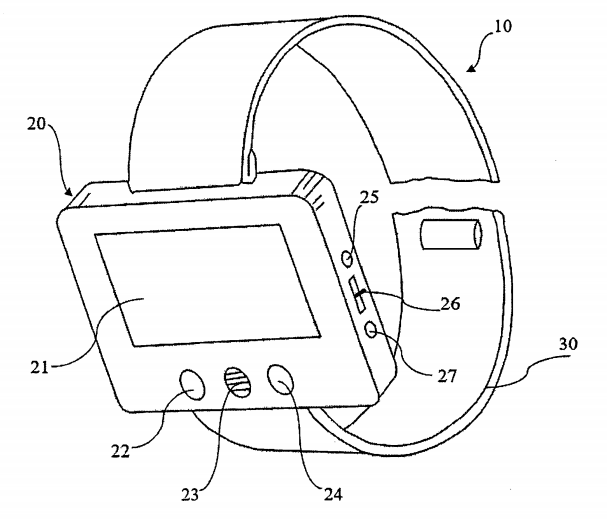
Thiết bị đeo tay cảnh báo
Giải pháp hữu ích về “Thiết bị đeo tay cảnh báo các tham số của lồng ấp trẻ sơ sinh bằng công nghệ truyền không dây ZigBee”.
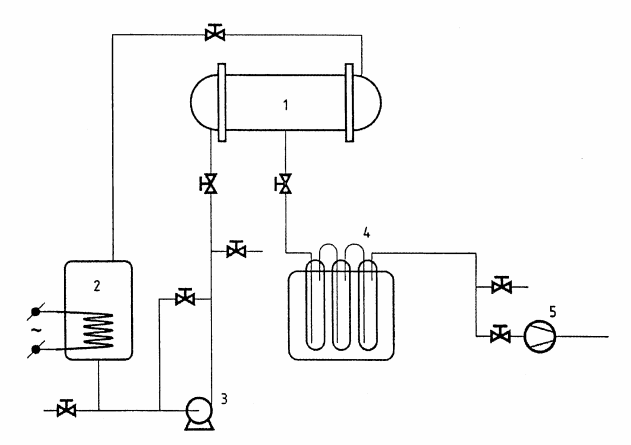
Hệ thống khử nước dung dịch cồn cao độ
Giải pháp hữu ích về “Hệ thống khử nước dung dịch cồn cao độ bằng công nghệ thẩm thấu bốc hơi sử dụng màng ống”.
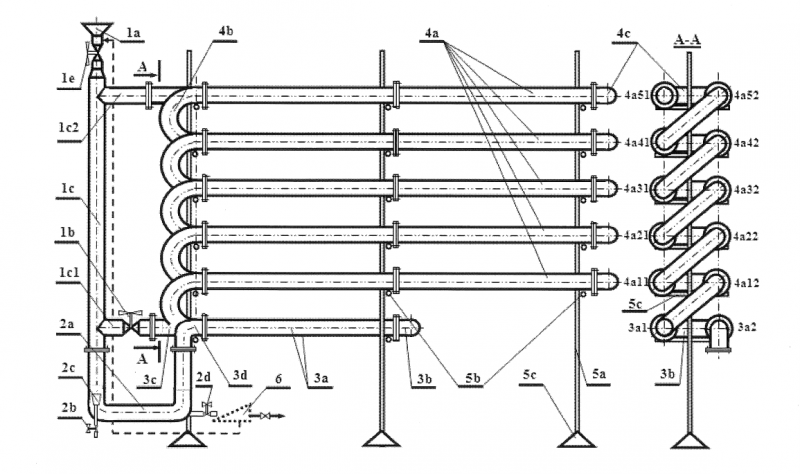
Thiết bị nuôi tảo đơn bào
Giải pháp hữu ích về “Thiết bị nuôi tảo đơn bào dạng ống nhiều tầng”.
Sáng chế về virus corona từ cơ sở dữ liệu Lens
- Từ khoá sử dụng: corona, virus.
- Kết quả tra cứu được ghi theo chuẩn IEEE dạng Web Page, có đính kèm link truy cập toàn văn.
Theo dõi sức khoẻ công trình xây dựng
Sáng chế về “Cảm biến áp lực hữu cơ bằng vật liệu polyme để theo dõi sức khỏe công trình xây dựng và hệ thống tự động theo dõi sức khỏe công trình xây dựng sử dụng cảm biến này”.
Xi măng Composit chịu Sulfat hoặc nước biển
Sáng chế về “Xi măng Composit có độ bền chịu Sulfat và/hoặc chịu nước biển”.
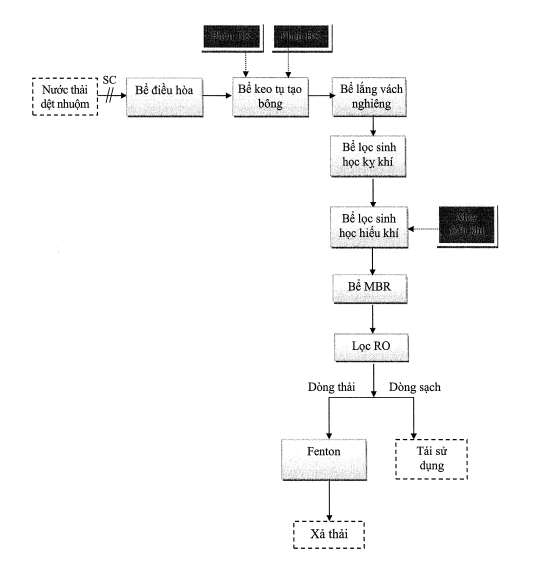
Hệ thống xử lý nước thải dệt nhuộm
Giải pháp hữu ích về “Hệ thống xử lý nước thải dệt nhuộm”.
Phương pháp xử lý nước thải y tế
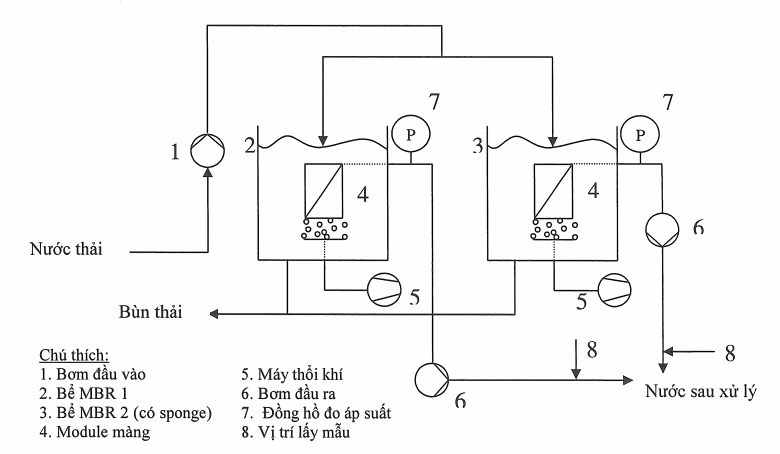
Giải pháp hữu ích về “Phương pháp xử lý nước thải y tế bằng màng sinh học (Membrane Bio Reactor, MBR) kết hợp giá thể di động (Sponge)”.
- Ngày sách Việt Nam 21/4/2024
- Cuộc thi thiết kế bìa sách 2024
- Ngày hội văn hóa đọc lần V
- Vòng Sơ Khảo Cuộc Thi Đại Sứ Văn Hóa Đọc Năm 2024
- Cuộc Thi Ảnh “Khoảnh Khắc VNUHCM Libraries”
- Ngày hội văn hóa đọc lần II
- Ngày hội văn hóa đọc lần IV
- Ngày hội văn hóa đọc lần III
- Tiếp GS Omer Mert Denizci, Trường ĐH Marmara Thổ Nhĩ Kỳ
- Tiếp Cô Claudia Tarzariol Từ The University Of Trento, Italy (Unitrento)
- Tiến sĩ kiều bào Mỹ tặng sách trị giá 150.000 USD cho sinh viên bách khoa
- Khảo sát ý kiến bạn đọc
-
Trực tuyến:7
-
Hôm nay:80
-
Tuần này:21498
-
Tuần trước:30809
-
Tháng trước:49338
-
Tất cả:3985167
.png "Logo Bottom")