



.png)








Bộ điều khiển chế độ lặn
Bài báo “Xây dựng bộ điều khiển các chế độ lặn khác nhau cho VIAM-AUV2000”.
Tác giả: Châu Thanh Hải, Trần Ngọc Huy, Tôn Thiện Phương, Huỳnh Mạnh Diễn.
Trích trong Tạp chí Phát triển Khoa học và Công nghệ, chuyên san Kỹ thuật và Công nghệ.
Một dạng mới của robot lặn không người lái sử dụng cơ cấu tích hợp xylanh và đối trọng để hỗ trợ lặn nổi, hệ thống điện và cơ khí được xây dựng theo dạng từng module nhằm dễ dàng tích hợp, tháo lắp và mở rộng hệ thống. Trong đó, nêu ra tính toán biên dạng tối ưu cho robot lặn, tiến hành mô phỏng ứng suất, biến dạng tác động lên vỏ của mô hình robot để tiến hành lựa chọn vật liệu và độ dày vỏ thích hợp để đảm bảo robot bền vững ở độ sâu 50m.
Bài báo cũng trình bày những ưu điểm nổi trội trong thiết kế lai tạo giữa dạng AUV truyền thống sử dụng thiết bị đẩy và bánh lái để xoay chuyển và dạng glider sử dụng cơ chế đối trọng và xylanh hút nhả nước để lặn nổi. Ngoài ra, thiết kế hệ thống điều khiển cho robot cũng được đề cập và làm rõ thông qua lựa chọn các thiết bị cảm biến, cơ cấu chấp hành, thiết kế hệ thống mạch điện, hệ thống thiết bị đẩy 600W và bộ ước lượng góc xoay ba trục nhằm phục vụ khả năng hoạt động ổn định cho robot ở độ sâu 50m.
Bên cạnh đó, bài báo còn trình bài mô hình toán của mô hình robot lặn VIAM-AUV2000, từ đó, tiến hành xây dựng và mô phỏng áp dụng các giải thuật điều khiển cho robot lặn hoạt động chính ở hai dạng: có sử dụng thiết bị đẩy (chế độ AUV) và khôngsử dụng thiết bị đẩy (chế độ Glider).
Đọc toàn văn:
http://stdjet.scienceandtechnology.com.vn/index.php/stdjet/article/view/548/1118
Bộ điều khiển chế độ lặn

Đánh giá tiềm năng gió và tối ưu hoá tua-bin
Bài báo “Đánh giá tiềm năng gió và tối ưu hoá tua-bin trong trang trại điện gió sử dụng phần mềm WAsP và WindPRO”.
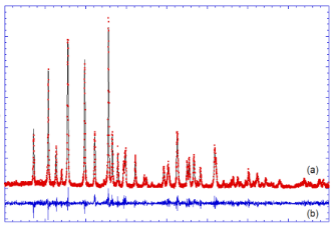
Đan cài ion Na+ vào olivine LiFePO4
Bài báo “Nghiên cứu quá trình đan cài ion Na+ vào cấu trúc olivine LiFePO4”.
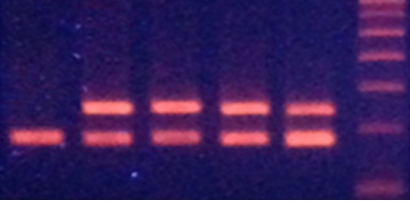
Chế tạo hạt Fe3O4 tách chiết DNA
Bài báo “Chế tạo hạt nano Fe3O4 nhiều kích thước ứng dụng trong tách chiết DNA từ mẫu sinh học”.

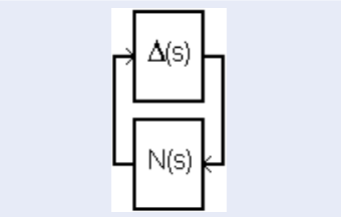
Thông số điện máy biến áp
Bài báo “Nhận dạng thông số điện máy biến áp lực áp dụng chẩn đoán sự cố”.
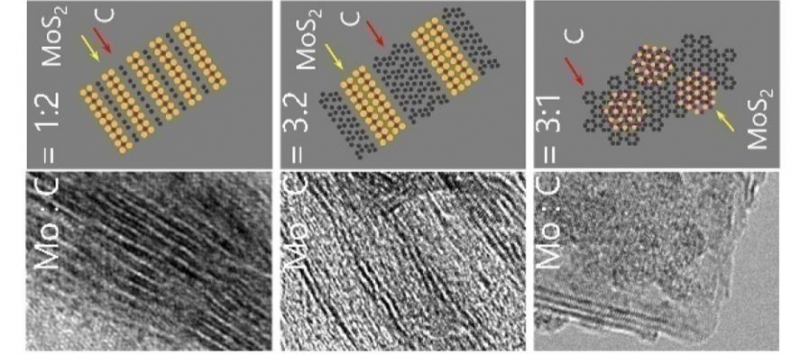
Controllable synthesis of MoS2/graphene low-dimensional nanocomposites
Full Length Article “Controllable synthesis of MoS2/graphene low-dimensional nanocomposites and their electrical properties”
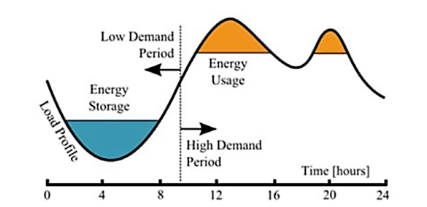
Điều phối dòng công suất cho lưới điện Microgrid
Bài báo “Mô phỏng điều phối dòng công suất cho lưới điện Microgrid sử dụng hệ thống năng lượng mặt trời và hệ thống pin lưu trữ năng lượng”

Synthesis of silver/reduced graphene oxide for antibacterial activity
Full Length Article “Synthesis of silver/reduced graphene oxide for antibacterial activity and catalytic reduction of organic dyes”.
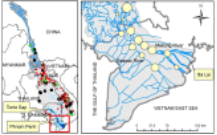
Morphological change assessment from intertidal to river-dominated zones using multiple-satellite imagery
Full Length Article “Morphological change assessment from intertidal to river-dominated zones using multiple-satellite imagery: A case study of the Vietnamese Mekong Delta”.
- Ngày sách Việt Nam 21/4/2024
- Cuộc thi thiết kế bìa sách 2024
- Ngày hội văn hóa đọc lần V
- Vòng Sơ Khảo Cuộc Thi Đại Sứ Văn Hóa Đọc Năm 2024
- Cuộc Thi Ảnh “Khoảnh Khắc VNUHCM Libraries”
- Ngày hội văn hóa đọc lần II
- Ngày hội văn hóa đọc lần IV
- Ngày hội văn hóa đọc lần III
- Tiếp GS Omer Mert Denizci, Trường ĐH Marmara Thổ Nhĩ Kỳ
- Tiếp Cô Claudia Tarzariol Từ The University Of Trento, Italy (Unitrento)
- Tiến sĩ kiều bào Mỹ tặng sách trị giá 150.000 USD cho sinh viên bách khoa
- Khảo sát ý kiến bạn đọc
-
Trực tuyến:5
-
Hôm nay:155
-
Tuần này:10255
-
Tuần trước:30809
-
Tháng trước:38095
-
Tất cả:3973924
.png "Logo Bottom")