



.png)








Tối ưu bộ thông số bước đi rô-bốt
Giải pháp hữu ích về “Quy trình tối ưu bộ thông số bước đi của rô-bốt dạng người dùng thuật toán di truyền nâng cao (MGA)”.
Số bằng: 2-0001984
Ngày công bố: 25/2/2019
Tác giả: Hồ Phạm Huy Ánh, Nguyễn Thanh Nam, Chung Tấn Lâm
Chủ bằng: Đại học Quốc gia TP.Hồ Chí Minh.
Giải pháp hữu ích đề xuất quy trình tối ưu hóa bộ thông số bước đi của rô-bốt dạng người (biped robot) dùng thuật toán di truyền nâng cao (MGA). Đầu tiên giải pháp hữu ích đề xuất quy trinh xây dựng động học ngược cho rô-bốt dạng người 12 bậc tự do (dof) dựa trên nhóm thông số đặc trưng. Từ đó phát triển quy trình tối ưu bộ thông số đặc trưng này dùng thuật toán di truyền nâng cao. Cụ thể thuật toán di truyền nâng cao (MGA) là công cụ cốt lõi được dùng trong quy trình để tối ưu các thông số của dáng đi rô-bốt dạng người. Quy trình tối ưu được thực hiện luôn đảm bảo hai yêu cầu là giữ ổn định bước đi cùng bảo đảm tốc độ chân bước của rô-bốt dạng người. Ngưỡng ổn định dựa theo vị trí xác định của điểm mômen zero (ZMP) sẽ cho phép thay đổi vận tốc bước đi theo chiều dài bước. Vị trí ZMP được tính toán dựa trên quy trình tối ưu mới đề xuất, không đòi hỏi động học hệ thống phức tạp. Các kết quả của quy trình tối ưu thông số bước đi của rô-bốt dạng người dùng MGA theo giải pháp đã được mô phỏng và sẽ được triển khai trên rô-bốt dạng người kích thước thật, có tên HUBOT-3.
Đọc toàn văn:
http://www.noip.gov.vn/documents/20182/643126/1984.pdf/a5fa10ee-4989-4dee-9c28-31a93dfb7e99
Theo noip.gov.vn
Tối ưu bộ thông số bước đi rô-bốt
Dữ liệu định vị toàn cầu theo thời gian thực
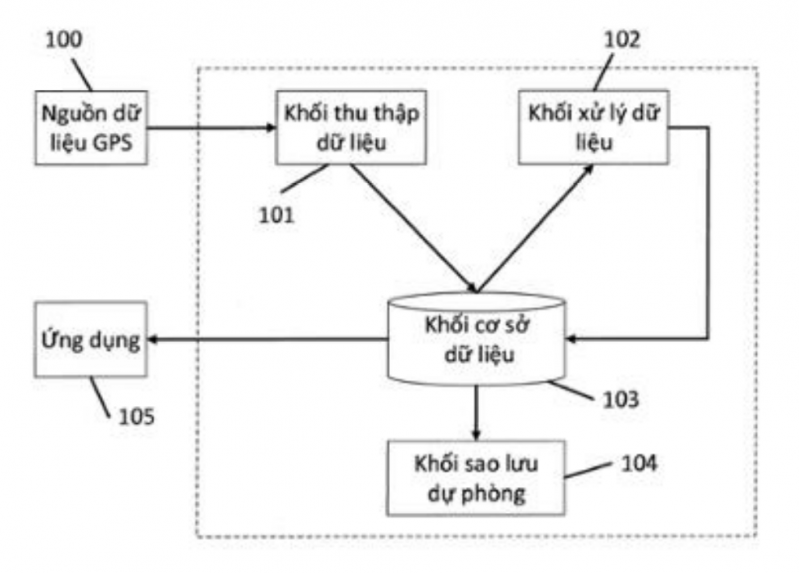
Giải pháp hữu ích về “Hệ thống và phương pháp xử lý dữ liệu định vị toàn cầu (GPS) theo thời gian thực dùng cho hệ thống giao thông thông minh”.
Thiết bị đeo tay cảnh báo
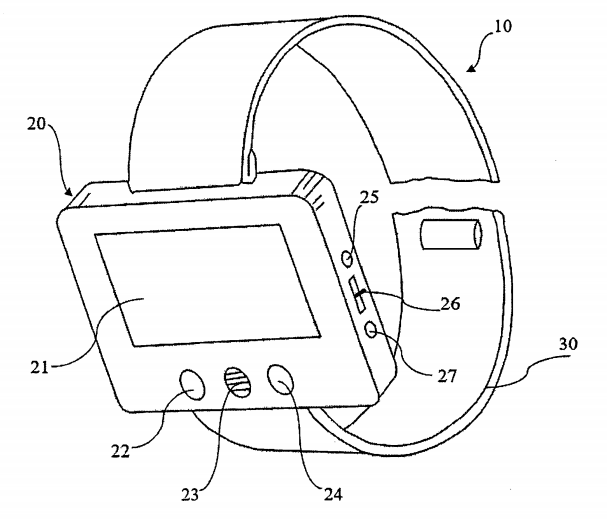
Giải pháp hữu ích về “Thiết bị đeo tay cảnh báo các tham số của lồng ấp trẻ sơ sinh bằng công nghệ truyền không dây ZigBee”.
Hệ thống khử nước dung dịch cồn cao độ
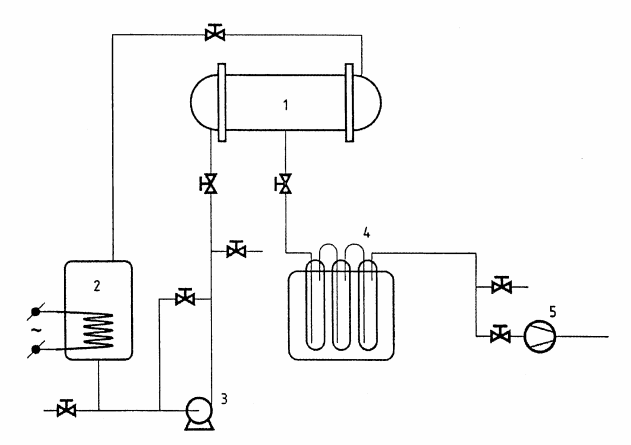
Giải pháp hữu ích về “Hệ thống khử nước dung dịch cồn cao độ bằng công nghệ thẩm thấu bốc hơi sử dụng màng ống”.
Thiết bị nuôi tảo đơn bào
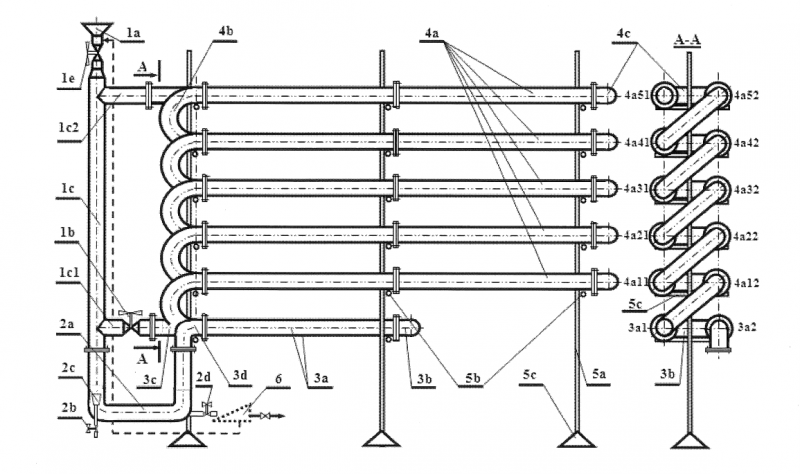
Giải pháp hữu ích về “Thiết bị nuôi tảo đơn bào dạng ống nhiều tầng”.
Sáng chế về virus corona từ cơ sở dữ liệu Lens
- Từ khoá sử dụng: corona, virus.
- Kết quả tra cứu được ghi theo chuẩn IEEE dạng Web Page, có đính kèm link truy cập toàn văn.
Theo dõi sức khoẻ công trình xây dựng
Sáng chế về “Cảm biến áp lực hữu cơ bằng vật liệu polyme để theo dõi sức khỏe công trình xây dựng và hệ thống tự động theo dõi sức khỏe công trình xây dựng sử dụng cảm biến này”.
Xi măng Composit chịu Sulfat hoặc nước biển
Sáng chế về “Xi măng Composit có độ bền chịu Sulfat và/hoặc chịu nước biển”.
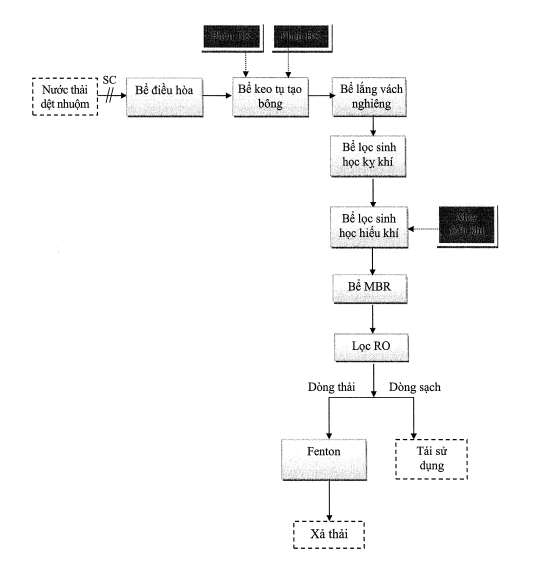
Hệ thống xử lý nước thải dệt nhuộm
Giải pháp hữu ích về “Hệ thống xử lý nước thải dệt nhuộm”.
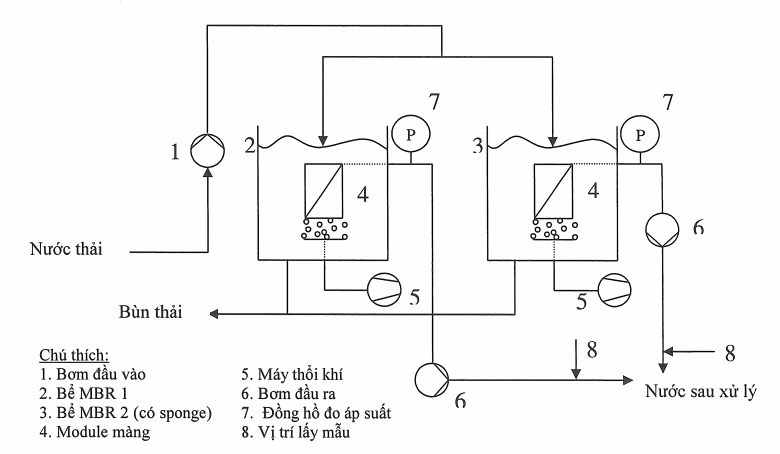
Phương pháp xử lý nước thải y tế
Giải pháp hữu ích về “Phương pháp xử lý nước thải y tế bằng màng sinh học (Membrane Bio Reactor, MBR) kết hợp giá thể di động (Sponge)”.
- Vòng Sơ Khảo Cuộc Thi Đại Sứ Văn Hóa Đọc Năm 2024
- Hoạt động chào mừng "Ngày sách Việt Nam 21/4/2024"
- Ngày hội văn hóa đọc lần V
- Cuộc Thi Ảnh “Khoảnh Khắc VNUHCM Libraries”
- Ngày hội văn hóa đọc lần II
- Ngày hội văn hóa đọc lần IV
- Ngày hội văn hóa đọc lần III
- Tiếp GS Omer Mert Denizci, Trường ĐH Marmara Thổ Nhĩ Kỳ
- Tiếp Cô Claudia Tarzariol Từ The University Of Trento, Italy (Unitrento)
- Tiến sĩ kiều bào Mỹ tặng sách trị giá 150.000 USD cho sinh viên bách khoa
- Khảo sát ý kiến bạn đọc
-
Trực tuyến:20
-
Hôm nay:5722
-
Tuần này:25200
-
Tuần trước:28342
-
Tháng trước:50634
-
Tất cả:4014303
.png "Logo Bottom")